Inteligencia Artificial
Un dron imita a Lara Croft al conseguir aterrizar sobre un vehículo en movimiento
Una estrategia para acelerar el reparto de paquetes por drones es que viajen en camiones y solo se encarguen del último kilómetro de entrega, algo que ya está cerca gracias a este sencillo sistema
Una de las grandes aplicaciones potenciales de los drones autónomos es la entrega de paquetes. Pero su limitado alcance es una barrera. Una de las estrategias para solucionarlo consiste en llevarlos en camiones de reparto para que se encarguen de la entrega del último kilómetro y para cargarlos a su vuelta. El dron despegaría desde el camión con el paquete y volvería después de la entrega.
Pero para ello, los drones deberían ser capaces de despegar y aterrizar sobre un vehículo en movimiento, para que el camión de reparto nunca tuviera que detenerse durante su ruta.
Despegar desde un vehículo en movimiento es más sencillo, ya que equivale a un despegue en condiciones de viento fuerte. Pero aterrizar es otra cosa bien distinta, y suscita una pregunta interesante: ¿sería capaz un dron autónomo de aterrizar sobre un vehículo en movimiento?
Hoy recibimos una respuesta gracias al trabajo del investigador del Laboratorio de Robótica Móvil y Sistemas Autónomos en Montreal (Canadá) Alexandre Borowczyk y sus compañeros. El equipo ha empleado sensores de bajo coste para desarrollar un sistema sencillo que permite que un dron autónomo aterrice sobre un vehículo en movimiento.
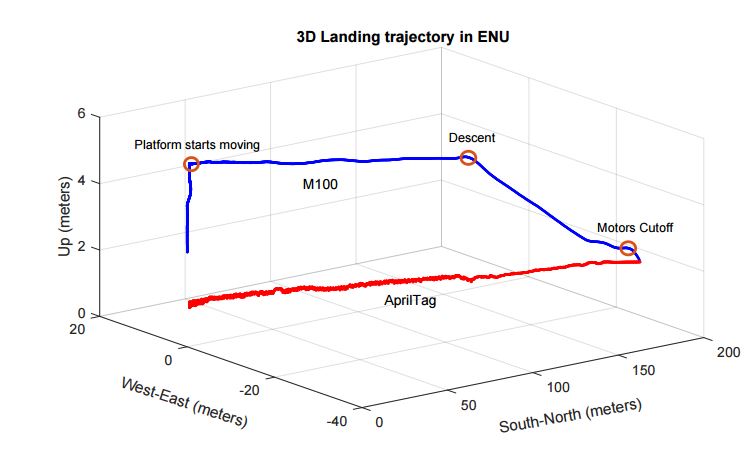
El sistema consta de una plataforma de aterrizaje que incorpora un código de barras en 2D llamado AprilTag y está equipado con un teléfono móvil que transmite sus coordinadas de GPS y cualquier cambio de movimiento.

El cuadricóptero está equipado con su propia unidad de GPS y una unidad de medición inercial, por lo que tiene información robusta sobre su ubicación dentro del espacio tridimensional. También incluye una cámara de suspensión cardán y un chip que procesa las imágenes y planifica las trayectorias.
El aterrizaje tiene lugar en dos etapas. Durante la primera, el cuadricóptero traza una trayectoria hasta el vehículo terrestre utilizando su propia posición y la del vehículo.
Durante la segunda, emplea su cámara para ubicar el código de barras de la plataforma de aterrizaje, y lo utiliza para navegar y aterrizar sobre ella, encima del tejado del vehículo.
Los resultados hablan por sí mismos. El equipo de Borowcyzk ha utilizado su sistema para aterrizar un cuadricóptero autónomo sobre un vehículo que se desplazaba a 30 kilómetros por hora (km/h), 40 km/h y hasta 50 km/h (ver el vídeo). El trabajo detalla: "Demostramos el aterrizaje experimental y automático de un MAV multirrotor sobre un vehículo terrestre en movimiento que se desplaza a la mayor velocidad hasta la fecha, con pruebas realizadas con éxito a una velocidad de 50 km/h".
Es un trabajo impresionante que añade un truco más a la infraestructura que podría conseguir que los drones hagan entregas, antes o después.
Ref: arxiv.org/abs/1611.07329: Autonomous Landing of a Multirotor Micro Air Vehicle on a High Velocity Ground Vehicle
Inteligencia Artificial
La inteligencia artificial y los robots están transformando nuestra forma de trabajar y nuestro estilo de vida.
-
El gobierno de EE UU pone bajo la lupa a las empresas de IA por publicidad engañosa
La Comisión Federal de Comercio (FTC) de Estados Unidos ha tomado medidas contra varias empresas de IA por mentir y realizar publicidad engañosa, una lucha que continuará durante el próximo mandato de Donald Trump

-
Las emisiones de la IA están a punto de dispararse aún más
Las emisiones de los centros de datos se han triplicado desde 2018. A medida que modelos de IA más complejos como Sora de OpenAI comiencen a generalizarse, es probable que esas cifras se disparen

-
La IA llega al campo de batalla para redefinir la toma de decisiones en la guerra moderna
Anduril, fabricante de drones y misiles con IA, ha firmado un acuerdo con el Pentágono de EE UU para integrar sus sistemas en conflictos armados y optimizar la toma de decisiones, un aspecto que ya ha generado preocupación en organismos internacionales como Human Rights Watch
