Un software y unos sensores les permiten generar un mapa de la zona. Solo necesitarían a un operador humano en la primera vuelta de reconocimiento

Foto: Este cuadricóptero no chocará con las tuberías porque ha elaborado un mapa en 3D del entorno utilizando sensores y un ordenador incorporados.
Cada vez hay más drones comerciales dedicándose a tareas como la inspección de plataformas petrolíferas y las cosechas. Pero aún requieren un piloto humano altamente cualificado, e incluso los que son semiautónomos normalmente utilizan mapas previamente elaborados o acceden a los datos mediante un enlace inalámbrico.
Unos investigadores de la Escuela Politécnica Federal de Zúrich (Suiza) están haciendo que los drones sean más independientes. Han demostrado un pequeño dron que puede elaborar su propio mapa en 3D de un entorno desconocido con una ayuda mínima de un operador humano, y luego planifica sus propias rutas por el espacio y sus obstáculos de forma autónoma.
"Es la primera vez que podemos demostrar un mapeo completo, la relocalización – que el dron encuentre su posición en el mapa – y la planificación a bordo", dice el investigador Michael Burri, que trabajó en el proyecto. La combinación de software y sensores podría facilitar el despliegue de drones para tareas como inspeccionar una plataforma petrolífera, dice. Solo sería necesario un primer vuelo manual para que el dron elabore su mapa. Para inspecciones posteriores, el dron podría cumplir con la tarea de forma autónoma.
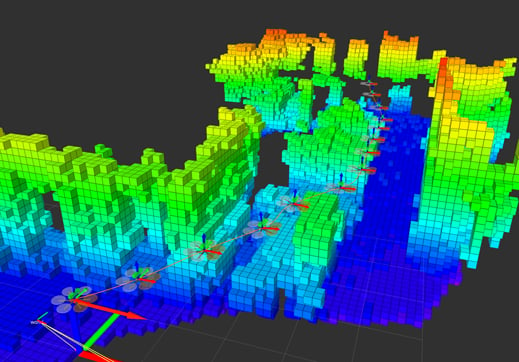
Foto: El dron utiliza su mapa en 3D para planificar la ruta más eficiente para atravesar un espacio.
El equipo de Zúrich utilizó un pequeño cuadricóptero de un kilo, el AscTec Firefly, y lo equipó con una cámara estereoscópica y sensores que informan de la velocidad, orientación y fuerzas gravitacionales. Probaron su software con un vuelo realizado dentro de un antiguo emplazamiento industrial, un entorno desafiante que incluía grandes conductos y otros equipos industriales.
El dron necesita un pequeño empujón humano para arrancar en un nuevo entorno. Mientras que un operador le ayuda a realizar un vuelo para explorar el nuevo espacio, el software del dron elabora un mapa en 3D al comparar los datos procedentes de sus sensores de movimiento y de orientación con imágenes de su cámara.
Las imágenes de profundidad de la cámara son utilizadas para crear el mapa en 3D; los espacios por los que no podrá volar el dron están señalizados en el mapa (ver vídeo). Una vez completado, el dron puede planificar la ruta más directa hasta cualquier destino objetivo, esquivando los obstáculos mapeados mientras vuela.
El mapeo individual y las técnicas de sensor se han demostrado con anterioridad, pero no en conjunto a bordo de un dron autónomo, dice Wolfram Burgard, un profesor de la Universidad de Freiburg (Alemania). "Esto acerca la tecnología aun más a las aplicaciones del mundo real de inspección y vigilancia", dice. Un trabajo sobre el nuevo sistema se presentó en la Conferencia Internacional de Robots y Sistemas Inteligentes el mes pasado. Burgard era el editor jefe del panel de revisión de trabajos.
Sin embargo, hacer que todas esas capacidades de mapeo quepan dentro de un pequeño dron conlleva un precio. Con el ordenador y los sensores de a bordo, el dron utilizado en los experimentos sólo puede volar durante unos siete minutos, en lugar de los 15 minutos de vuelo de los que dispondría sin el peso extra. Burri dice que unas mejoras en el diseño del dron evitarían este problema. Y considera que los drones más avanzados del mercado podrían alcanzar una duración de vuelo de unos 20 minutos con la misma carga.
Junto con los otros investigadores, trabaja ahora para dotar al dron de la capacidad de evitar choques con objetos móviles que no aparezcan en su mapa – por ejemplo humanos o equipos móviles.
Inteligencia Artificial
La inteligencia artificial y los robots están transformando nuestra forma de trabajar y nuestro estilo de vida.
-
Minería paralela de datos, la técnica del nuevo traductor de Meta para dominar más de 100 idiomas
La aplicación presentada por Meta nos acerca a la creación de un dispositivo de traducción universal similar al Pez de Babel de La guía del autoestopista galáctico, de Douglas Adams

-
Convirtiendo los trinos en datos: esta IA estudia la migración de las aves a través del sonido
Tras décadas de frustración, las herramientas de aprendizaje automático están revelando a los ecologistas un tesoro de datos acústicos

-
Mundos virtuales generativos y modelos que "razonan": qué nos depara la IA en 2025
Ya sabemos que los agentes y los pequeños modelos lingüísticos serán las grandes tendencias del futuro. No obstante, destacamos otras cinco tendencias que deberías seguir de cerca este año
