El videojuego les enseña a hacer cosas, como bajar las escaleras, sin peligro de romperse y les hace más hábiles en el mundo real
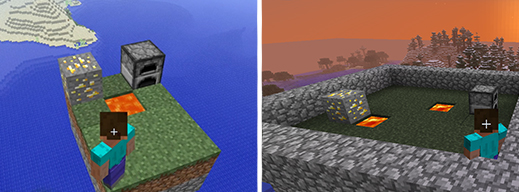
Foto: Minecraft se empleó para enseñar a un agente virtual qué pasos excluir al intentar colocar un lingote de oro dentro de una caldera.
El videojuego Minecraft, un mundo virtual hecho de bloques retro y pixelados que pueden modificarse y reorganizarse en unas configuraciones arquitectónicas infinitas, ha sido elogiado por enseñar a los jóvenes usuarios creatividad, resolución de problemas y técnicas de supervivencia (dentro de determinados módulos hay que evitar amenazas que incluyen zombies). Pues, resulta que hasta los robots sin experiencia pueden aprender algo a través del juego.
Stefanie Tellex, una profesora de la Universidad de Brown (EEUU), está utilizando Minecraft, junto a máquinas del mundo real, para explorar maneras de que los robots resuelvan los problemas más rápido y con mayor eficacia. No es algo que necesiten hacer la mayoría de los robots, puesto que trabajan en entornos fijos, realizando tareas que han sido cuidadosamente programadas de ante mano. Pero podría resultar importante al empezar los robots a asumir tareas más complicadas e indefinidas en entornos menos estructurados. Un robot diseñado para ser asistente doméstico, por ejemplo, tendría que averiguar cómo realizar distintas tareas.
"Podrías decirle al robot ‘Prepárame un café’, y acto seguido añadir ‘Pon una colada’", dice Tellex. "En este contexto, donde el objetivo no está definido de antemano, existe este problema de planificación. Encontrar la secuencia de acciones que va a funcionar dentro de este entorno en concreto supone todo un reto. Nuestro enfoque se trata de aprender estas cosas más rápidamente".

Foto: El algoritmo de los investigadores se probó en un robot programado para ayudar en la cocina.
El reto para un robot es que no dispone de un entendimiento contextual del mundo. Esto significa que tiene que repasar todas las acciones posibles que podrían ayudarle a cumplir con un objetivo. Entonces para lavar la ropa, un robot podría considerar si utilizar la cafetera supondría una ayuda. Y para el robot sofisticado que trabaja en un entorno complejo, el número de escenarios que podría tener que considerar es enorme, lo que requiere de una gran potencia computacional.
Tellex, junto con uno de sus alumnos de postgraduado, David Abel, y varios compañeros más de la Universidad de Brown, desarrollaron un algoritmo que permite que un robot vaya descartando determinadas vías de actuación mediante la comprensión de la dirección hacia la que apunta determinada tarea. Armado con tal algoritmo, un robot podría comprender que hacer la colada no requiere de utensilios ni equipos de cocina – un conocimiento que bien puede ser programado de antemano, o aprendido a través de la experiencia.
Minecraft se empleó para poner a prueba este enfoque educacional. Los investigadores controlaban un personaje virtual al que se le había encargado colocar un lingote de oro virtual dentro de una caldera virtual, mientras evitaba un charco de lava virtual. Después de realizar la tarea dentro de un entorno limitado, a través de un largo proceso de ensayo y error, el algoritmo que controlaba al personaje aprendió que ciertos comportamientos, como colocar lingotes de oro en el suelo, podrían saltarse mientras intentaba cumplir con el objetivo.
Cuando se le pidió realizar la misma tarea dentro de un entorno más complejo, el personaje entonces podía repasar un conjunto mucho menor de escenarios posibles. Este enfoque podría permitir a los robots aprender cómo realizar una tarea dentro de un entorno virtual antes de afrontar escenarios del mundo real (ver Este circuito virtual permite entrenar a tu robot en situaciones extremas).
Manuela Veloso, una profesora de la Universidad Carnegie Mellon (EEUU) especializada en la robótica, dice que el aprendizaje virtual ya es un área importante para la robótica. "Está claro que un robot no puede emplear un sistema de ensayo y error para aprender a bajar unas escaleras, porque se romperá en el primer intento", dice. "La simulación, en general, puede facilitar el entrenamiento de un modelo, que luego puede ser empleado por un robot real".
Los investigadores de la Universidad de Brown probaron este enfoque con una máquina: un robot Baxter de Rethink Robotics. Asignaron al robot como ayudante de cocina, y lo programaron para comprender qué acciones podrían descartarse para ciertas recetas. Esto volvió más eficiente a la máquina a la hora de determinar su propio rumbo dentro de la elaboración de brownies.
El enfoque que aplicaron los investigadores de la Universidad de Brown no sólo es más eficiente, sino que de alguna manera también es más humano, pues requiere de un entendimiento más profundo de la tarea y de su contexto. "Nos inspiramos en la literatura de ‘affordances’ (licencias o permisos) que describe cómo las personas ven el mundo mientras intenten conseguir algo", dijo Tellex.
La utilización de Minecraft para afinar la mente del robot por parte de la Universidad de Brown en Vimeo.
Computación
Las máquinas cada vez más potentes están acelerando los avances científicos, los negocios y la vida.
-
Google anuncia un hito hacia la computación cuántica sin errores
Una técnica llamada “código de superficie” permite a los bits cuánticos de la empresa almacenar y manipular datos fielmente durante más tiempo, lo que podría allanar el camino a ordenadores cuánticos útiles

-
El vídeo es el rey: bienvenido a la era del contenido audiovisual
Cada vez aprendemos y nos comunicamos más a través de la imagen en movimiento. Esto cambiará nuestra cultura de manera inimaginable

-
Esta empresa quiere superar a Google e IBM en la carrera cuántica con un superordenador de fotones
La empresa quiere construir una computadora que contenga hasta un millón de cúbits en un campus de Chicago
