Inteligencia Artificial
Gratis y con sello español: así es CARLA, el simulador de conducción autónoma más completo
La Universidad Autónoma de Barcelona ha participado en la creación de este entorno virtual de fuente abierta que ofrece una enorme cantidad de escenarios adaptables a distintas condiciones climáticas y de iluminación, justo lo que los coches necesitan para aprender a conducir
En vista del bombo mediático y el enorme interés comercial, parece que los coches sin conductor están listos para revolucionar los sistemas de transporte de todo el mundo y estos vehículos 100% autónomos están a punto de echarse a las calles (ver "El coche autónomo conectado va a ser el elemento que más va a cambiar nuestras ciudades").
Pero la historia es más compleja. Las tecnologías más avanzadas de conducción autónoma solo rinden bien con un conjunto extremadamente limitado de entornos y condiciones climáticas. (ver El almacén se alza como el entorno ideal para probar coches autónomos antes de salir a carretera). Y aunque durante los próximos años la mayoría de los coches nuevos contarán con algún tipo de conducción asistida, aún quedan muchos años para que veamos vehículos autónomos capaces de conducir sin supervisión humana en cualquier circunstancia (ver No tire su carnet de conducir, el primer coche autónomo será una decepción).
Uno de los principales problemas es que resulta difícil entrenar vehículos para hacer frente a todas las situaciones. Y las más desafiantes suelen ser las menos comunes (ver "Es imposible diseñar un sistema de conducción autónoma que lidie con todo"). Hay una gran variedad de circunstancias complicadas a las que los conductores rara vez se enfrentan: un niño que sale corriendo a la carretera, un vehículo que circula en sentido contrario, un accidente que se produce inmediatamente delante, y muchos más.
CARLA: Un simulador de conducción urbana de fuente abierta.
En cada una de estas circunstancias, un coche autónomo debe ser capaz de tomar la mejor decisión, aunque la probabilidad de enfrentarse a ellas sea mínima. Y eso plantea una pregunta importante: ¿cómo pueden los fabricantes automovilísticos entrenar y probar sus vehículos ante eventos tan infrecuentes?
Hoy recibimos una especie de respuesta gracias al trabajo del investigador de Intel Labs Alexey Dosovitskiy y varios compañeros suyos del Toyota Research Institute y del Centro de Visión por Computador de Barcelona (España). El equipo ha creado un simulador de conducción de código abierto que los fabricantes de coches pueden utilizar para probar las tecnologías de conducción autónoma en situaciones realistas.
El sistema, llamado CARLA (siglas del inglés de: Car Learning to Act, o Coche que Aprende a Actuar, en español), simula una amplia gama de condiciones de conducción y repite situaciones de peligro de manera interminable para ayudar al aprendizaje. El equipo ya lo utilizó para evaluar el rendimiento de varios enfoques diferentes de conducción autónoma.
Los simuladores de conducción no son nuevos. Ya existen muchas versiones digitales, modelos de carreras realistas (ver Una ciudad ficticia de 32 hectáreas con bares pintados para probar coches autónomos) y hasta entornos basados en videojuegos (ver Cómo enseñar a un coche autónomo a que conduzca solo sin salir de casa Los coches autónomos están jugando al 'Grand Theft Auto' para aprender a conducir). Varios grupos de conducción autónomos los han usado para probar sus tecnologías.
Pero ninguno de ellos ofrece el tipo de retroalimentación que los sistemas de conducción autónoma necesitan para capacitarse de manera efectiva. Ni ofrecen un control significativo sobre las condiciones de conducción ni las acciones de otros agentes. Los simuladores de carreras no suelen incluir tráfico cruzado ni peatones. Y los simuladores de ciudades como Grand Theft Auto no permiten controlar el clima, la posición del Sol, el comportamiento de otros vehículos, semáforos, peatones y ciclistas, entre otros elementos (ver Los coches autónomos están jugando al 'Grand Theft Auto' para aprender a conducir).
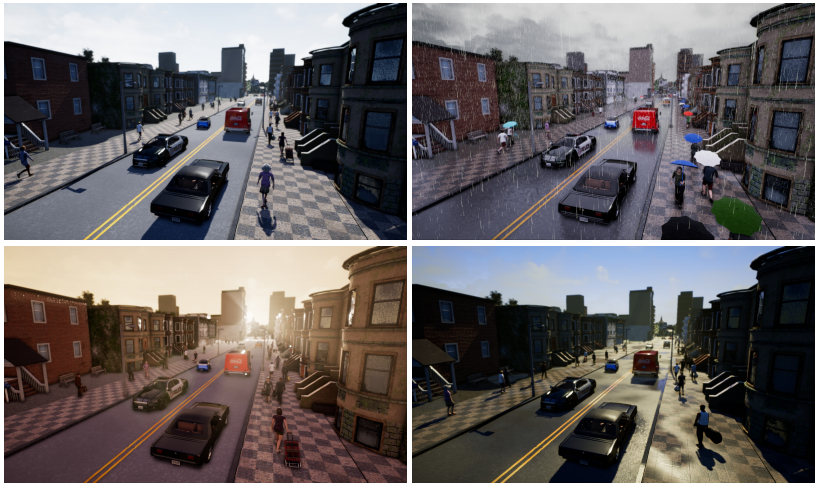
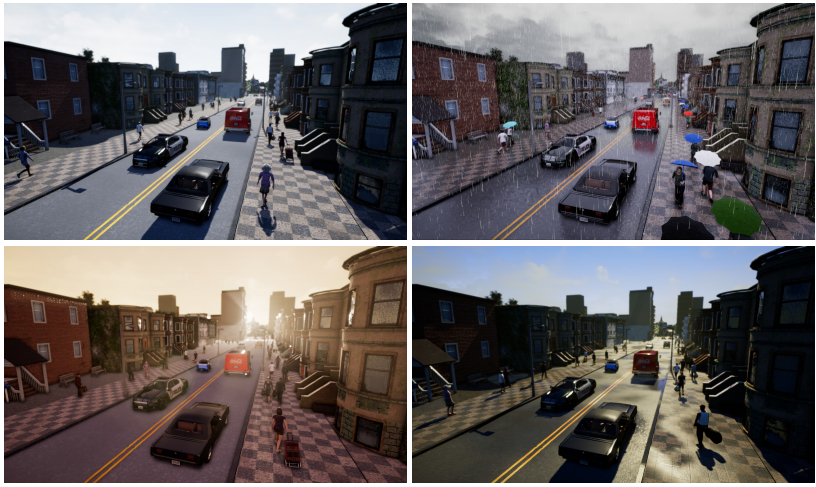
Así que el equipo de Dosovitskiy creó su propio simulador. CARLA ofrece una biblioteca de activos que se pueden ser aplicarse en ciudades bajo diferentes condiciones climáticas y de iluminación. La biblioteca incluye 40 edificios diferentes, 16 modelos de vehículos animados y 50 peatones animados.
El equipo los ha utilizado para crear dos ciudades con varios kilómetros de carreteras transitables y luego ha probado tres enfoques diferentes para el entrenamiento de sistemas de conducción autónoma. "Los enfoques son evaluados en escenarios controlados de creciente dificultad ", explica el equipo.
Los resultados demuestran que el sistema puede jugar un papel útil. El equipo ha publicado un vídeo del comportamiento de conducción resultante que muestra claramente la eficacia de los sistemas, pero también por qué este tipo de entrenamiento no se puede realizar en carreteras reales: los vehículos a veces conducen por la acera o por el lado opuesto de la carretera y golpean a otros vehículos, entre otras acciones potencialmente peligrosas.
Por supuesto, un sistema como CARLA nunca podría reemplazar el tiempo de conducción en carreteras reales. Pero puede proporcionar un terreno de pruebas útil y seguro para nuevas ideas. Y por eso es importante.
CARLA es de fuente abierta y de uso gratuito para fines no comerciales. Por tanto, cualquiera puede probarlo en www.carla.org. El equipo afirma: "Esperamos que CARLA permita a una amplia comunidad participar activamente en la investigación de la conducción autónoma".
Ref: arxiv.org/abs/1711.03938: CARLA: An Open Urban Driving Simulator
Inteligencia Artificial
La inteligencia artificial y los robots están transformando nuestra forma de trabajar y nuestro estilo de vida.
-
Al habla con la IA: el reto de lograr voces más diversas e inclusivas
La iniciativa Common Voice, de Mozilla, busca que las voces generadas por inteligencias artificiales sean más inclusivas y reflejen una mayor variedad de dialectos para asegurar que las particularidades de cada lugar y cultura se preserven frente al avance tecnológico

-
Estos robots aprendieron a superar obstáculos reales desde un entorno virtual gracias a la IA
Un nuevo sistema podría ayudar a entrenar robots usando exclusivamente mundos generados mediante inteligencia artificial

-
Por qué la IA podría comerle la tostada a la computación cuántica
Los rápidos avances en la aplicación de la inteligencia artificial a las simulaciones físicas y químicas hacen que algunos se pregunten si de verdad necesitamos ordenadores cuánticos
